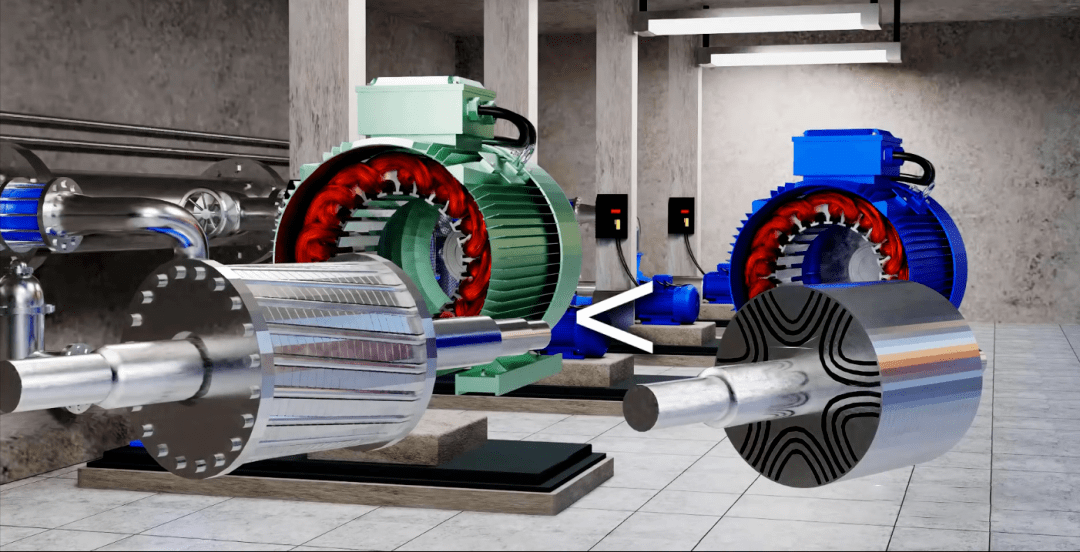
Այս հոդվածը ներկայացնում է շահագործման միասնական կարգ համաժամանակյա դժկամությունշարժիչային շարժիչներ `հիմնվելով նպատակային կերակրման արագ հաջորդականության վրա` օգտագործելովքշել ինվերտորըՄի շարք Մեթոդը պահանջում է չափել փուլային հոսանքների եւ նրանց ածանցյալների արժեքները ըստ ժամանակի հիմնված նմուշների, դեռեւս ռոտորով եւ դրանովՄոդելի վրա հիմնվածՀաշվարկումներ: Այն թույլ է տալիս ինքնագնահատում կատարելՓուլի դիմադրությունԵվ DQ AXES ինդուկտիվությունները դաշտային ուղղվածության նախնական հավաքածուի համարԸնթացիկ կարգավորիչներՄի շարք Ավելին, այն հայտնաբերում է ռոտորի դիրքը առանց շարժման, գործառույթն անհրաժեշտ է գործարկման համար, որոնք հագեցած են շարժիչներովԲարձրացվող կոդավորողներստանդարտ ծառայության մեջ: Ուսումնասիրությունը վերաբերում է 3 կՎտ-սինխրոն դժգոհ շարժիչի նախատիպին `հոսքի արգելքի ռոտորով: Ինչպես իրատեսական սիմուլյացիաների հաշվառումոչ գծայինՆերկայացվում են մեքենայի վարքագիծը եւ փորձարարական թեստերը, ցույց տալով սխալըՄոտավոր դիրքը, փուլային դիմադրությունը եւ DQ առանցքի ինդուկտիվությունները եւ արդյունավետները: Արդյունքները ապացուցում են մեթոդի հուսալիությունը:
Փոստի ժամանակը: Jul-03-2023